第15回・ライントレーサの製作実習(1)
 |
県立磯子工業高校にて、同校電気科の先生方(佐々木先生、梶本先生、松井先生、栗田先生、内田先生)のご指導のもと、ライントレーサの製作に取り組みました。全体の説明と、安全に気を付けて取り組んでほしいという注意を受けています。 |
*ギアボックスの組み立て * 2つのグループに分かれて作業を開始します。B班は、まずギアボックスの組み立てからです。プラモデルを作る要領で、解説書を見ながら組み立てていきます。 |
 |
 |
*プリント基板加工(穴あけ) * ボール盤を使って、プリント基板の穴あけ作業です。あける穴の数はおよそ100個、集中して作業をしますので、目がかなり疲れます。 |
*アルミ(シャーシ)加工 * 一方、A班は、アルミ板にけがき針でけがき(アルミ板に図面を書き写す)をします。そして、センターポンチで位置を定めた後、ボール盤で穴をあけていきます。 |
 |
 |
シャーという足踏み式切断機で、アルミの板を切断しているところです。見事な切れ味にびっくり! |
| これは、アルミの板を折り曲げているところです。実にきれいに見事に折り曲げてくれます。 |  |
 |
*プリント基板加工(はんだ付け) * 午後からはんだ付け作業に入ります。はんだ付けのコツを教えてもらい練習をした後、メイン基板のはんだ付けです。 |
| 場所や部品の向きを間違えないように、慎重に作業をしていきます。 |  |
 |
午前最後の時間帯には、県立磯子工業高校設計製作部の活動を見学させていただきました。ロボット競技会に出場するマシンの最終調整をしているところということで、ピンポン玉を集めてゴールに入れるというマシン、コースを周回するライントレーサを見せてもらいました。カーブをあざやかにきってすごいスピードでトレースしていくのにはびっくりしました。 |
* 生徒の感想 *
1日目の実習を終えての生徒の感想です。
- 自分が思っていたよりも作業が難しかった。先生の話が分かりやすかったのでとても良かった。説明のプリントを作ってくれたので、分かりやすかった。集中して作業をしていたので、特に目が疲れた。
- 基板の穴あけは、しっかりやらないと後で大変と思って、慎重にあけた。モーターBoxの説明書がちょっとわかりにくかったけれど、間違えないように組み立てた。初日ということもあり全体的に慎重で正確にできたから、最後までこのままの調子でやりたいと思う。
- 初めてこんなに本格的なロボット製作をして、プリント基板のことや、シャーシ加工のことなど知らなかったことをいろいろ知ることができて良かった。はんだ付けは、しっかり暖まらなかったり、はんだ糸とてこがうまくつかなかったりと苦労したが、何とかコツをつかみ細かいところもできるようになった、はんだ付けが初めておもしろいと感じた。
- はんだ付けがうまくできなかったけれど、初めてのことばかりで楽しかった。
- 今日やった作業の中で一番むずかしかったのははんだ付けです。うまく基板にのらず、苦労しました。
- ギアボックスの組立に時間がかかってしまいました。基板に穴をあけたとき、穴が少しずれてしまい、差し込むのが大変だったあげく、1本はみだしたりして大変だった。
- 久しぶりに工作をして楽しかった。
- 穴あけは前にもやったことがあったのですが、切断はやったことがなく、やってみて切れ味のすごさに驚きました。はんだ付けは思ったよりはうまくできたけれど、何回か隣とくっついてしまったりして、大変でした。
- アルミの加工などをするときに、いろいろな工具を使えて、とても良い体験ができた。手ではできない作業など、工具はとても便利だと思った。はんだ付けは結構うまくできて良かった。残り2日もとても楽しみだ。
- なかなか難しかったけれど、楽しくできて良かったと思う。明日以降もしっかりと作業していきたい。
- はんだ付けがとても楽しかった。最初、「亜鉛」かと思ったけれど、「なまり」と「すず」と聞いてなるほどって思いました。今日は、ほとんどの事が初めてのことばかりで、最初は嫌だと思ってけれど、どんどん楽しくなって1日があっという間でした。シャーも楽しかったです。自分の体全体を使っている気がしてとても楽しかった。一日ありがとうございました。
- 初めてこういう作業をしました。アルミの穴あけはかなり集中力が必要でした。はんだづけも、やけどや、他につながらないようになど注意しながらやる作業なので、特に目が疲れました。

第16回・ライントレーサの製作実習(2)
 |
県立磯子工業高校の山下校長から、「工業高校ならではの授業を是非体験していってください。」と挨拶を受けて今日の授業が始まりました。
|
*プリント基板加工(はんだ付け) * 昨日の続きで、センサー基板のはんだ付けをしています。 |
 |
 |
作業の合間に、「ねじ切り」も体験させてもらっています。なめらかなねじを作るのは、なかなか大変。 |
*シャーシ等の組み立て * メイン基板とセンサー基板をケーブルでつないでいきます。 |
 |
 |
ケーブルのはんだ付けがなかなか大変。 |
基板と電池ボックス、モーターなどをつなぎます。そして、シャーシ(本体)に、キアボックス、基板などを取り付けていきます。 |
 |
 |
最後に、センサー、ICを取り付け、電池をつなぎ完成です。 |
| 基板のチェックをしていただいています。 |  |
 |
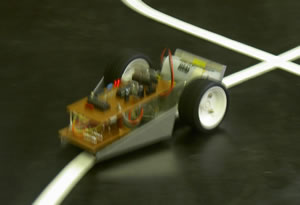
コースを走らせてみます。きちんとトレースできたかな? |
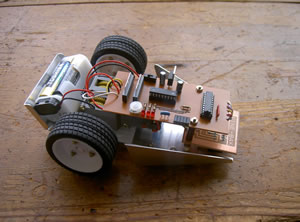
完成!! これが、今回作ったマシンです。 |
 |
 |
*プログラミング * マシンが完成したら、いよいよプログラミングです。ICの各ポート番号と接続回路についての説明を受けています。入力と出力それぞれのイメージを持ちましょう。 |
最初は、ledを点灯させるという簡単なものからトライします。メモ帳を使ってコードを入力しています。 |
 |
|
*電気実験 * 午前、最後の時間に、電気実習室をいうところで、高電圧の電気実験を見せていただきました。絶縁体であるガラス板に数万ボルトの電圧をかけたり、10万ボルトの電気を一気に放電して雷を起こしたりと、迫力のある実験でした。 |

* 生徒の感想 *
2日目の実習を終えての生徒の感想です。
- 今日は、リード線でモーターと電子部品を取り付け、ほぼ完成した。出来てからライントレーサを走らせて、しっかりとラインの上を走ったときはとてもうれしかった。最後に少しだけプログラミングをしたが、意味がよくわからないので、明日しっかりと勉強したいと思う。
- ショートしていた配線のミスに気付かなかったりと何度も失敗したけれど、先生方のおかげで何とか動くようになった。改めて工業高校の先生方はすごいと思った。
- ついに本体が完成に近づいてきました。90度のクランクができたりできなかったりで、やや不安です。
- 基板に部品を取り付けるのがむずかしかった。自分の作ったマシンが動き、ライントレースしたときは、とてもうれしかった。また、昼に見た電気の実験が、普段は絶対見ることのできないものだったので、とても感動した。
- 作ったロボットが走らなくてあせった。先生が原因を調べてくれたが、なかなか原因がわからず、しばらくしてセンサーを反対に入れていたということがわかり、情けなかった。しかし、その後うまく走ってくれた感動は大きかった。
- 今日の作業は、割と順調にいき、何とか走ったが、熱のせいで電池ボックスが溶け出していたのには驚いた。はんだ付けがうまくできていなかったようだったので、しっかり最後までつけなけれな大変なことになると痛感した。それでも初めてラインをトレースして動いてくれた時は、感動した。
- 自分が作ったマシンが動いてとてもうれしかったです。最初は、センサーが逆になっていたり、接触部分が悪いなどの理由で動かなかったので、その分動いたときの喜びが大きかったです。次はプログラミングで、とてもむずかしそうなので、明日もより一層がんばりたいです。
- 昨日失敗したせいで、一度分解しなければならなくなり大変だったけれど、黒いラインの上を走らせることができた。うまく作れていたかどうか不安だったので、うまくいって良かった。明日のプログラミングも今日以上にがんばりたいと思います。
- はんだ付けもすべて終わり、本体の組立も完成して、実際に走らせることができた。最初はうまく曲がれなかったけれど、調整をなんかいか繰り返して、ちゃんと一周することができてとても良かった。後半は、プログラミングをした。むずかしいと思ったけれど、これが終われば自分で作ってきたロボットが完成するので、明日もがんばりたいと思います。
- 本体を組み立てて、実際にライントレースさせてみた。2つめの曲がり角がまがれなかった。 いろいろ調整して何とかうまく走ったが、やはり機械は小さなミスでも大きな支障が出るから、正しくセットしないとだめだなと思った。
第17回・ライントレーサの製作実習(3)
 |
*プログラミング * 最終日は、コンピュータ教室にて、C言語によるプログラミングの学習です。最初は3つあるledを順次点滅させる、次はモーターを動かす、そしてセンサーの白黒判定に応じてモーターを動かす・・・とどんどん課題がむずかしくなっていきます。 |
スペル間違いなどのちょっとしたミスでも、コンパイルはうまくいきません。その度にやり直しです。デバッグ作業もなかなか大変。 |
 |
 |
うまくコンパイルできたら、それをマシンに転送します。さあ、実験です。思ったとおりの動きをしてくれるでしょうか? |
いろいろと試行錯誤しているうちに、マシンの不具合がでてきます。はんだづけを確認したり、タイヤをつけ直したり、ギアボックスを組み立て直したり・・・・。 |
 |
 |
白地に黒のラインでうまくトレースできるかどうか、試しています。これができたら、今度は黒地に白ラインのトレースにプログラムを変更します。 |
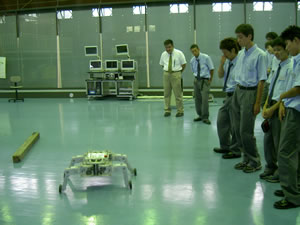
別室に用意された大きなコースで試しています。カーブはきれいにトレースしていきますが、十字とクランクが思うようにいかないようです。センサの位置をずらしたり、プログラムを変更したりして調整をしていきます。 |
 |
 |
いよいよタイムトライアル! 1台ずつコースを走ります。皆が見守る中、完走するたびに拍手が起こります。一番早いマシンは、このコースを1分36秒で1周しました。 |
マシンが、カーブをきれいにトレースしていきます。 |
 |
 |
県立横浜清陵総合高校の石川校長から、「皆さんが生き生きとロボット製作に取り組んでいる姿を見て、素晴らしい授業だと感動しました。磯子工業高校の先生方に深く感謝するとともに、この授業で学んだことを次へとつなげていってほしいと思います。」を挨拶がありました。 |
| 県立磯子工業高校の桐野教頭から、「工業高校では、今回皆さんが学んだような物づくりを中心に学習をしています。この機会に学んだことを今後の学習に是非生かしてください。」ということばをいただきました。 |  |
|
3日間の講習を終えて、満足げな生徒たちです。磯子工業高校電気科の先生方には本当にお世話になりました。どうもありがとうございました。 |

* 生徒の感想 *
3日目の実習を終えての生徒の感想です。
- 3日間の中で、いろいろな体験ができた。特に、はんだ付けやプログラミングは難しかった。何とか苦労して出来たロボットが動かない時はショックが大きかった。何とか原因をつきとめたが、それでもうまく動いてくれない。なんだかんだで出来たロボットがしっかり動いた時の感動は大きかった。ロボットを1から作る作業は初めてなので、とてもいい体験をすることが出来ました。
- 組み立てるだけでもこんなに難しいとは思いませんでした。組み立てること自体は、そんなに困難ではなかったけれど、ギアがはずれたり、うまくかみ合わなかったりすて、何度も分解して組み直したのが大変でした。プログラミングは、自分の思った通りに動いてくれず苦労した。いくらまっすぐに動かそうと思ってもどうしても左右にふれてしまい、スピードが出せなかったのが残念でした。けれど、コースを走らせたときは、多少手をかかけたものの見事に完走しました。その時はこんなに感動するなんて思いもしませんでした。
- シャーシから切って作ったのは初めての事で楽しくできた。穴をあけることやはんだは久しぶりにやったので、失敗ばかりだった。ライントレースの時、一回は完走できたけれど、タイムトライヤルの時に完走できず残念だった。楽しく取り組めたけれど、自分のロボットはまだまだだと思った。
- はんだ付けから組み立てまで全部自分でやったのは初めてで、組み立てる順番を間違えたり、はんだ付けに失敗したり、いろいろと苦労したけれど、完成させることができて良かったです。プログラミングが上手くいかなくて、ライントレースを完走出来なかったのが少し残念です。
- 初めに行った車体作りは、工業高校にしかない機械などを使えたので、とても楽しかった。コンピュータを使い、複雑なプログラムを組み、何度も試作を繰り返して初めて動いた時は、とても感動した。
- 組み立てはきちんと正確に組み立てていかないと動かないので大変だった。プログラミングも少しのミスで動かないので、大変だった。最終的に、コースをきちんと一周できたし、プログラミングも楽しかった。
- 3日間の中で一番面白かったのは、はんだ付けです。でも一番むずかしくもありました。
- 磯子工業高校でロボット製作をして、使った道具が初めて見るものもあったりしてとてもいい体験でした。最後のプログラミングは、少しむずかしかったけれど、調整を何回か行って、最終的にはラインの上を走ったのですごいと思いました。最初はできないと思ったけれど、きちんと完成して走ることができたので、この3日間はとてもいい体験でした。
- はんだ付けがとてもむずかしくて、うまくできませんでした。しかし、最終的にはライントレースできたので良かったと思います。3日間磯子工業高校で実習ができ、とても楽しかったです。
- 初めは3日間もかけてロボットなんて作らなくてもいいと思っていましたが、やっていくうちに本当に楽しくなってきました。はんだ付けや、穴をあけるのとかもとても楽しかったです。先生もとても親切で、質問などがしやすかったから、良かったです。ロボットはうまく動いたけれど、あのコースを全部完走できなかったのが悔しいです。プログラミングもとても難しかったです。文字1つ、記号1つないだけで、動いてくれません。長いようで短かった3日間、こんな機会がないとできないものだと思います、お世話になりました。
第18回・国際レスキューシステム研究機構 川崎ラボラトリー見学
| *IRS川崎ラボラトリー見学 * 川崎にある国際レスキューシステム研究機構(IRS)川崎ラボラトリ-を見学させていただきました。 *レスキューロボットに関する講演 * 電気通信大学 電気通信学部知能機械工学科 松野文俊教授から、ロボット研究、特にレスキューロボットの研究に関するお話をしていただきました。 |
|
 |
*生徒の感想* アクロバットロボットの蹴上がり制御では、ロボット自身に学習させているというお話があり、すごいなあと思いました。 9月11日のテロが起きた際に、救助しようと中に入った人が犠牲になってしまった。危険な場所に人間がいかなくてもすむように、レスキューロボットの開発に期待したい。 いろいろな技術を使って、ロボットが人間を助けたり、救助したりできるようになってほしい。また、ネジの原理を使ったロボットは本当にすごいと思った。ロボットを作るには、普通の発想ではとてもむずかしいと思った。 |
| *レスキューロボットのデモンストレーション* レスキューロボットが実際に動く様子を見せていただきました。 「ローラーウォーカー」 4足歩行ロボットですが、足先に車輪がついていて、これを用いてローラスケートをするように前進することもできます。足先にモーターなどを付ける必要がないため、軽量化がはかられていて、スムースな移動を実現しています。 |
 |
 |
「4輪惑星探査ローバー」
(東京工業大学広瀬研究室とIRSの共同研究) 球形の車輪が、ひし形に配置されていて、どんなでこぼこでも乗り越えていきます。宇宙で使用することを考えると、運搬のことも考慮しなければいけないということでした。宇宙環境を想定して開発したロボットは、災害現場でも応用できます。 |
|
*生徒の感想* どれを見てもすごいなあーというものばかりでした。ローラーウォーカーのアイディアがとてもおもしろいと思います。 ビデオで見たのとは違い、予想以上の動きだった。 キャタピラをつなげるという発想は、自分にはとうてい思いつかないと思った。タイヤの配置などもよく考えられている。足をタイヤにしてしまうというアイディアはすごいと思った。 |

「恐竜型ロボット」 |
| 「IRS蒼龍」
(東京工業大学広瀬研究室とIRSの共同研究) 災害現場などで、瓦礫の下に残された人を探しだすために開発された蛇型ロボットです。3つの節に分かれていて、蛇のように瓦礫の中をずんずん入っていって、頭につけたカメラで中の様子を映しだします。 *生徒の感想* ヘビ型ロボットがあんなに高い段差をこえるのを見た時にはかなり驚いた。有線・無線の問題など今後の課題となる部分についても理解ができた。 実際にへび型ロボットが動いているのを見てすごいと思った。長い体なのに、ひっくり返っても元に戻ることに驚いた。 |
 |
|
*展示ロボットの見学* 東京工業大学 広瀬研究室で開発されたものを中心に、展示ロボットの説明をしていただきました。 *生徒の感想* 壁を歩くことができるロボットがあったことに驚いた。ロボットに壁を歩かせようというアイディアがあり、かつそれを実現させてしまうなんて凄いとしか言いようがないです。 レスキューロボットだけでなく、月面用のロボットや危険な場所へ行けるロボットもあり、いろいろなことを知ることが出来ました。実際に動いているところを見てみたいと思いました。 |


* 生徒の感想 *
見学を終えて、生徒の感想です。
- とても勉強になることばかりだった。展示されているロボットが動くところを見ることができれば、もっと良かったと思います。
- ロボットを作ることは本当に大変なことだと思った。アイディア、予算、技術など、とても大変だと思う。だからこそ出来上がったものは、とても立派で、人々に興味を持たせるものができるのだと思った。
- 様々なロボットを目の当たりにして、とても貴重な体験ができた。
- レスキューロボットは、生物の生態を利用したものが多いと思った。
- なかなかわくわくだった。様々なロボットを見ることができて良かった。いつか自分で動かしてみたいと思う。
- 今日のお話はとても参考になった。これからこの経験を生かせる場面があるといいと思う。ロボットがこれからも役立つといいと思う。
- ロボットは万能っていうのはむずかしいのだなと感じた。そのかわり、一つの分野に対しては、とても素晴らしいものができていた。
- レスキューロボットの活躍を多いに期待しています。
- これからもロボットを進化させ続け、人のためになるようなものを作ってもらいたい。
- 松野先生の話を聞いて、ロボットについて自分が知らなかったことがわかった。レスキューロボットのデモンストレーションを見て、その動き方がすごいと思いました。展示されているロボットは、たくさんの種類があってすごかった。普段見ることのできない物をたくさん見ることができて、楽しかったし、とても良かったと思います。
- 救助活動にロボットは欠かせないものだということを改めて感じました。
- ロボットがすごく発達している。段を上がったり、物を飛び越えたり・・・。空気など、身のまわりのものをうまく利用しているのにもすごいと思った。本当にたくさん活躍してほしいと思うけれど、でもやはり人がやらなければならないこともあると思う。
清陵祭にて
9月18日~19日に、第1回清陵祭が行われました。「清陵ロボットフェスティバル」
と題して、授業での取り組みを発表しました。 |
|
|
制作したロボットを展示、デモしたり、ロボットに関して調べたことなどを発表しました。 |


第19回・まとめ
最後の授業になりました。夏休みに取り組んだロボラボにもう1度取り組みました。清陵祭に出品したりして、壊れてしまったマシンを復活させ、きれいにライントレースできるようにチューニングし直したということです。それでもやり始めるといろいろなことを試してみたくなり、あっという間に時間は過ぎていってしまします。磯子工業高校で本格的なライントレースをした後ということもあり、生徒たちの理解も前回よりずっと深まっていました。
講座を終えるにあたって、この授業に対するアンケートに協力してもらいました。 → アンケート結果
特に1年次生は、総合学科ということですので、3年次に「課題研究」が控えています。せっかく今回ロボットのことを学んだのだから、是非こういったテーマ設定も視野にいれてほしいとしました。
何だか名残惜しいような気がしています。そんな中、生徒の1人が、「ロボット部を作りたいと思うのですが、一緒にやろうという人いませんか?」言い出しました。実現するといいなあと思っています。
 戻る
戻る  次へ
次へ